2,500+ km, 14 days, 9 people, 5 cars.

2 x Mitsubishi Outlander PHEV electric 4x4 (with rally software - lol)
1 x Toyota Landcruiser Prado turbo-diesel 4x4
1 x VW 4wd diesel wagon (with emssions cheating software update)
1 x Mitsubish ASX FWD (however didn't come on outback dirt roads).

The first day saw us get out of town and meet up in Mildura. A 5:30am start saw us clear the city limits in good time as the double long week-end was defintely going to cause a crush on the roads.
The battery saw us get pretty close to the full 50km of light city electric noiseless driving. Once out on the highway the computer figured it was more efficient to switch over to ICE front wheel drive. Pressing the "Charge" button kicks off the onboard range extending generator. This feature is pretty much the killer app for Australian users, although surprisingly, there are now charge points at the weirdest places. Nevertheless there are no sealed roads let alone electricity where we're going.
Wildlife:
3 x ants
1 x snake
Some birds.

Too dry for anything to survive out there this year. There's just nothing there anymore. The dams at Gluepot dried up months ago. Not even mosquitoes. But there were still a few flies during the day.

Fuel consumption
The PHEV was getting 8.6l/100km on petrol and 18KWh/100km on battery. When charging and driving at 110km/h consumption blew out to 9.2l/100km on sealed South Australian roads. The other PHEV was running at about 9.6l/100km. I use 98 octane in mine while the other was running 91. It's unclear if the difference was due to the fuel type or one car having the bikes on the roof as opposed to the rear mount carrier.
There was no tally kept for consumption figures on the dirt. Essentially the speeds were way lower and the cars were configured to run in 4WD locked "rally" mode (lol). It would be reasonable to expect pretty good numbers though.
Range on the PHEVs was generally an indicated combined 470 to 520km with a fully charged battery and full fuel tank. However, we had no intention of actually testing the veracity of the computer's guess. The tanks were topped up everywhere we could. Furthermore prior to filling the tanks the batteries were topped up from the onboard generator to maximize distance and minimize anxiety.

Station Etiquete: Gates, camping, exploring, shooting
- Rule #1: Leave the gates as you find them!
- Rule #2: If it rains STAY OFF THE ROADS and camp if you have to. Apart from the extensive road damage that can be caused, you'll get bogged and be stuck anyway.
- Rule #3: Go straight through. No camping/exploring subject to rule 4.
- Rule #4: Get on the radio and get permission/advice to do anything else.
Read this: https://www.whichcar.com.au/opinion/advice-from-an-outback-station-owner

4WD/4x4
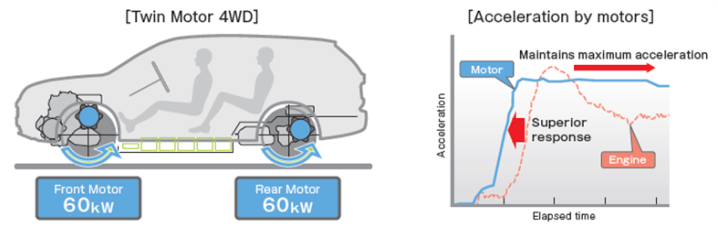
The 4WD aspects of the PHEV are very new when compare to the old mechanical "diff" and propeller shaft linkage systems found in previous generation "clunkers". The new Twin Motor 4WD system which uses two 60kW independent front and rear motors to drive the wheels can be controlled and "locked" by means of a computer.
Electric motors generate high torque instantly, a characteristic which translates to acceleration comparable to vehicles powered by a large capacity V8 ICEs.
During normal driving the computer selects an all wheel drive mode most of the time, albeit unlocked. Occasionally, when cruising on a highway it will shutdown the electrics and activate direct drive from the ICE to the front wheels (as there is no gearbox only one gear is available. Essentially this means if the electric motors fail the car cannot be driven since the single gear can only ever engage above 60km/h).
Enter the 4WD button. Press this and the car behave like a 4x4 with the front and rear axles locked. The electronics measures the rotational speeds of front and rear independant motors and via a computer synchronizes them mimicking a legacy mechanical system. But it doesn't end there.

Driving the PHEV (or the FEV as it's become known) in full rally 4x4 mode dubbed S-AWC was generally uneventful. The S-AWC software (described here: https://www.mitsubishi-motors.com/en/innovation/technology/library/s-awc.html?intcid2=innovation-technology-library-s-awc), from what I can understand, controls the car's "yaw". See the video for a definition of that:
So the Active Yaw Control (otherwise known by yet another acronym as: AYC) measures the steering angle of the front wheels. From that measurement it calculates that the car should be yawing at some degrees/second. When it does more (or less) than that number then you are out of control, i.e. there is a traction problem with the tyres not gripping the surface below. (Mitsubishi's explanation of mecahnical AYC: https://www.mitsubishi-motors.com/en/innovation/technology/library/ayc.html?intcid2=innovation-technology-library-ayc)
That's when the computer takes over. It starts changing power going to the left or right side of the car and even individual wheels. Indeed on a couple of occasions, when the vehicle was on cruise control going through some twisty rocky corners, you could feel the car doing "stuff". The in dash picture of the wheels and front to back power ratio began to blip. It only did it twice, and as I'm generally not an adventurous driver, it is to a large extent pretty much wasted on me. But it's easy to imagine a serious rally driver making this thing blip continuously.
Obviously going through rocky dusty sandy roads with lots of bends on cruise control is probably not recommended in a car without some type of yaw control software though. The safety aspect is really pretty cool.

While on the topic of cruise control, on a couple of occasions the car began to beep continiously and switched its cruise control off. On one occassion the road became really sandy to the point where it seemed we might get bogged. The S-AWC was trying to do stuff. After realizing we were slowing because the cruise had cut off, and heading for a tree, I simply planted the foot resulting in the car pulling its way around the bend and up over a sandy hill.

Soft road surface slowing a car
I put that episode down to the computer thinking it was feeding way too much power to the wheels at that instant, essentially trying to compensate for all the sand slowing us down, and so it just spat the dummy effectively saying: here human you take over. I suspect that the computer cutting power to all wheels induced some understeer contributing to the feeling we were heading for a tree.
Dust:
A quick read of this page ( http://www.outbackcrossing.com.au/FourWheelDrive/Air_Filters.shtml) shows the importance of keeping dust out of an ICE. Essentially the lifetime of an ICE air filter can be reduced to a couple of thousand km on outback Australian roads. The site recommends keeping a couple k's between vehicles to reduce engine dust problems.
One of the cool features of electric drive is that the ICE can be completely shutdown. This proved very useful when driving in convoy around Gluepot and through the stations to get there (there are no sealed roads for miles around there). The strategy is to turn on the ICE and use the onboard generator to charge when the air is clear. When approaching other cars in the convoy, pressing the EV button flips over to battery electric drive resulting in zero air being run through the now shutdown ICE's filter.
An A-B comparison of the two PHEVs showed one filter was largely clogged with dust causing a minor cloud when taken out and tapped, while the other was totally clean. Using this strategy outback PHEV owners could expect a long lifetime out of these cars.
